
Projekte.IndRobotArm (Struktur)
Arm
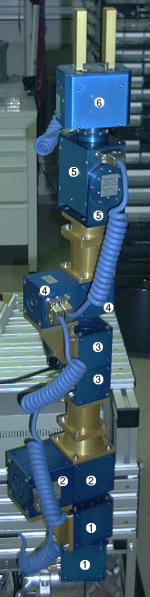
| Der Roboterarm ist aus 6 Power-Cube-Modulen plus einen Finger zusammengesetzt. |
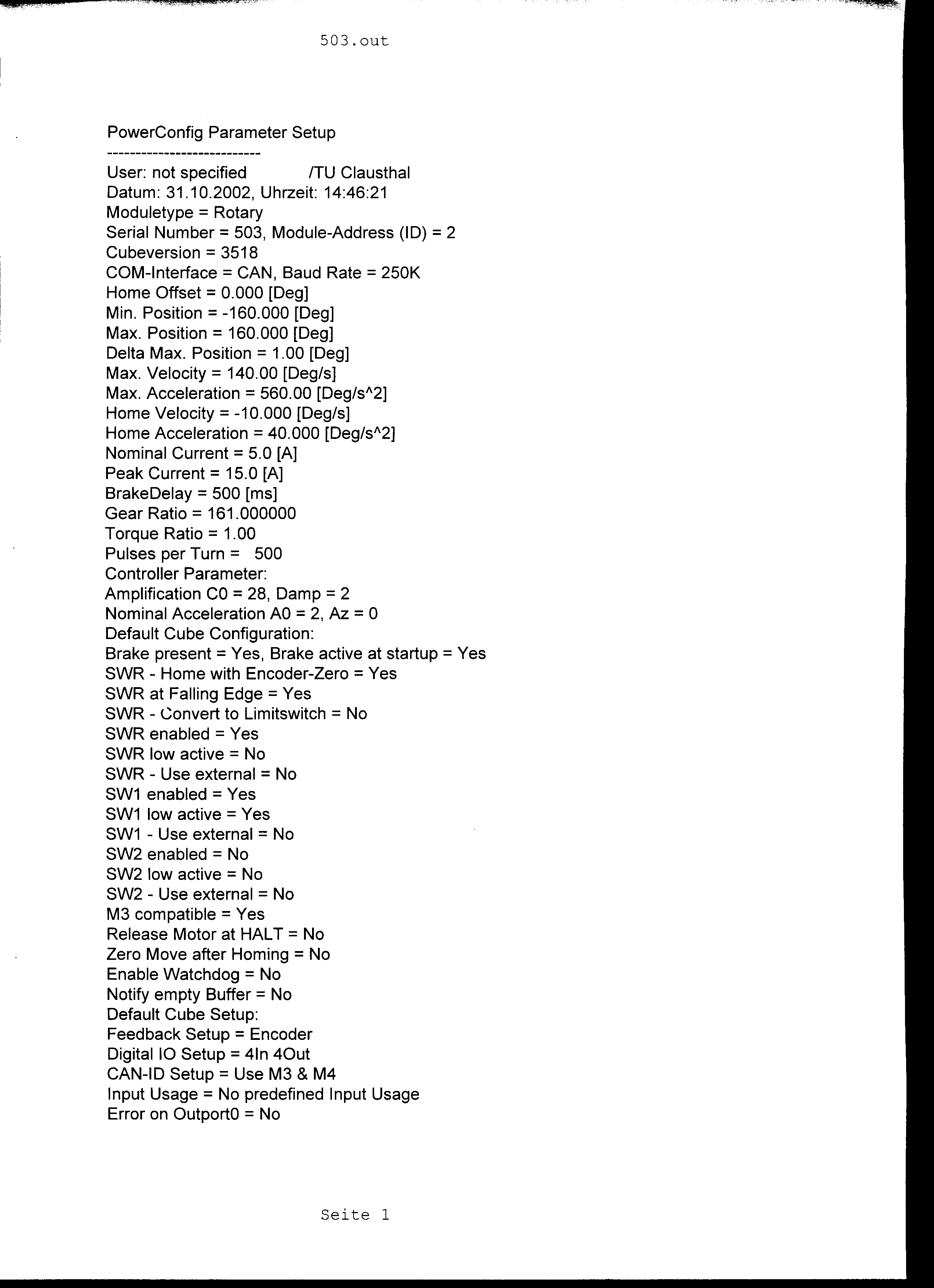
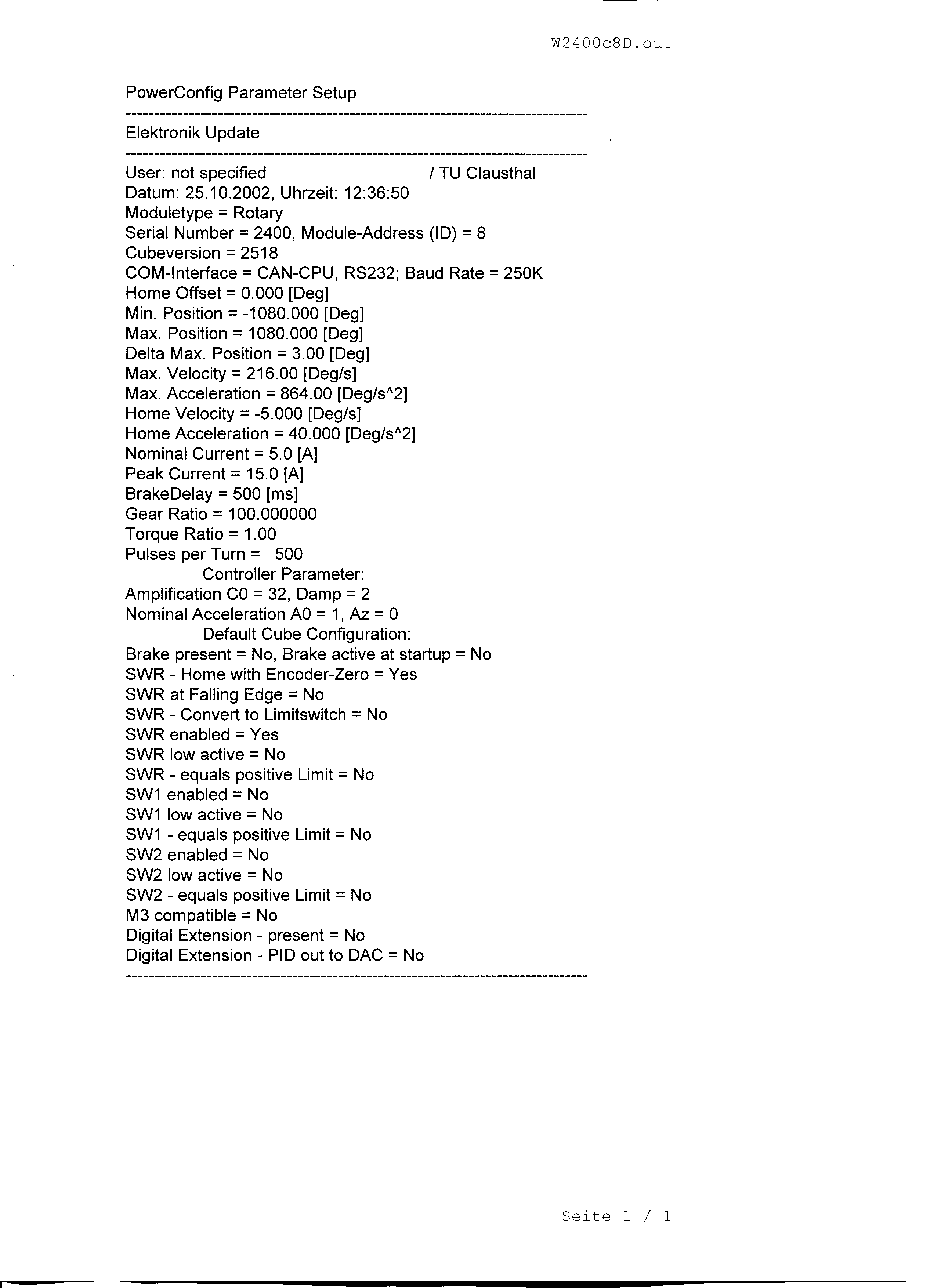
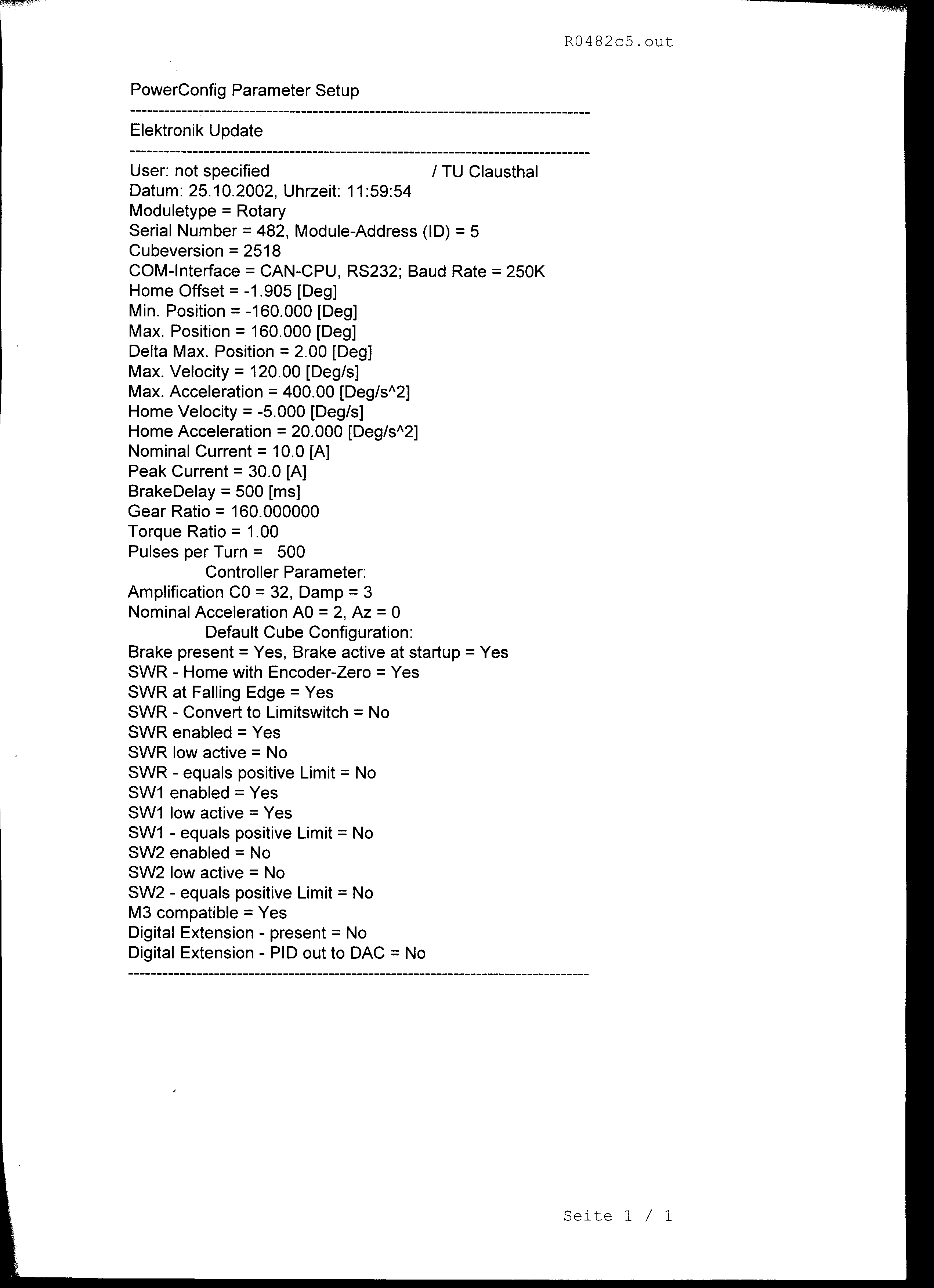
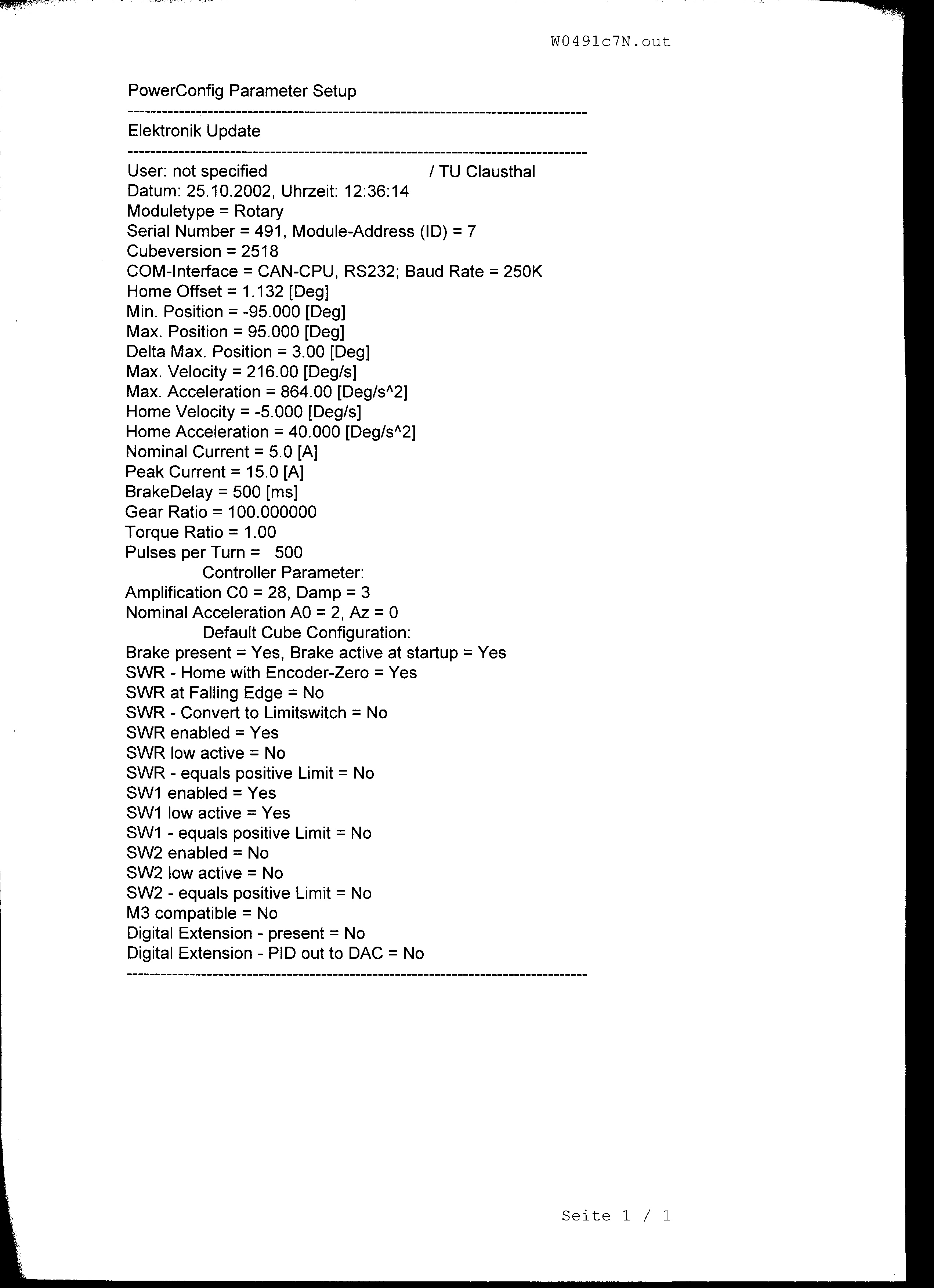
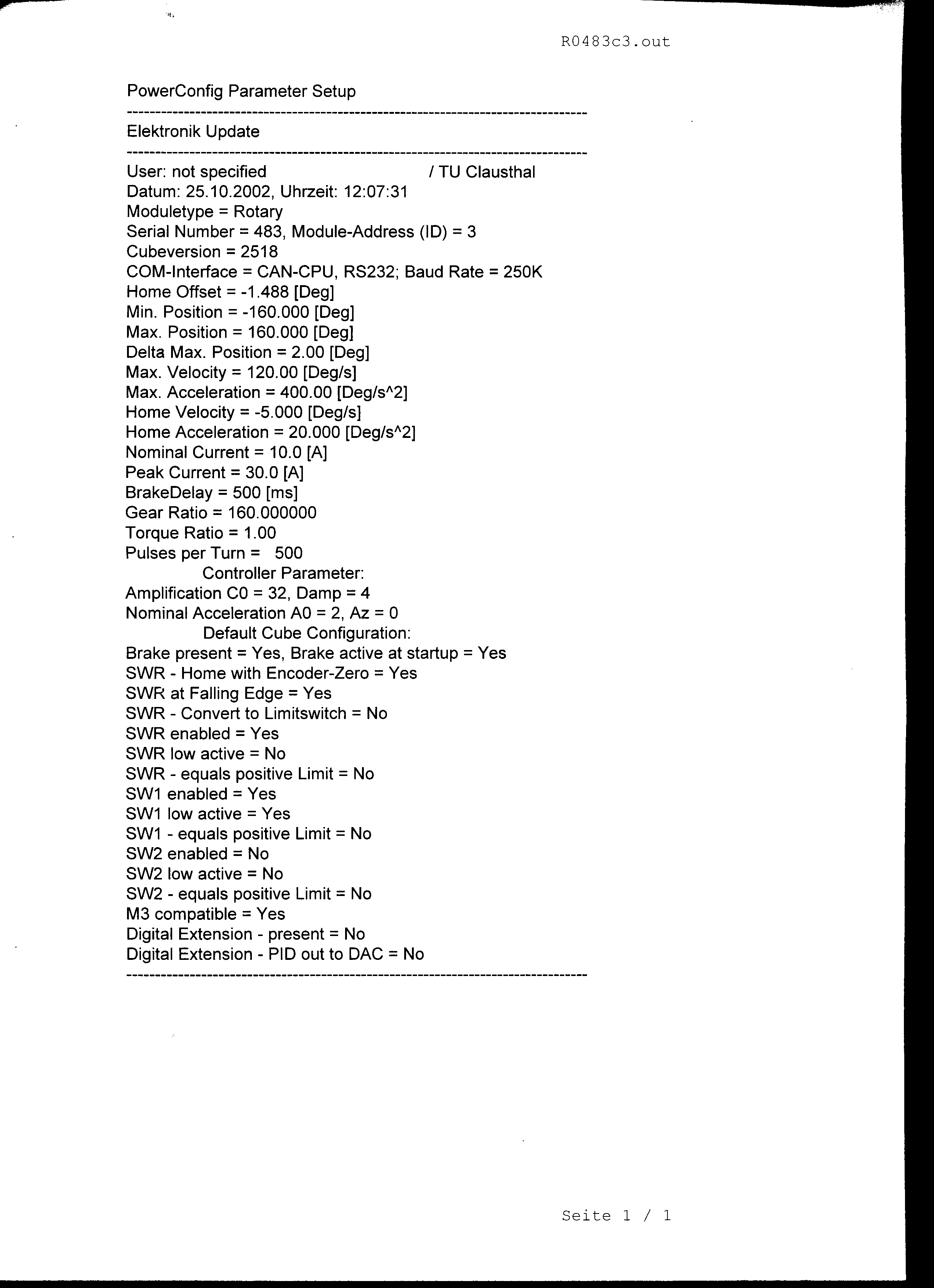
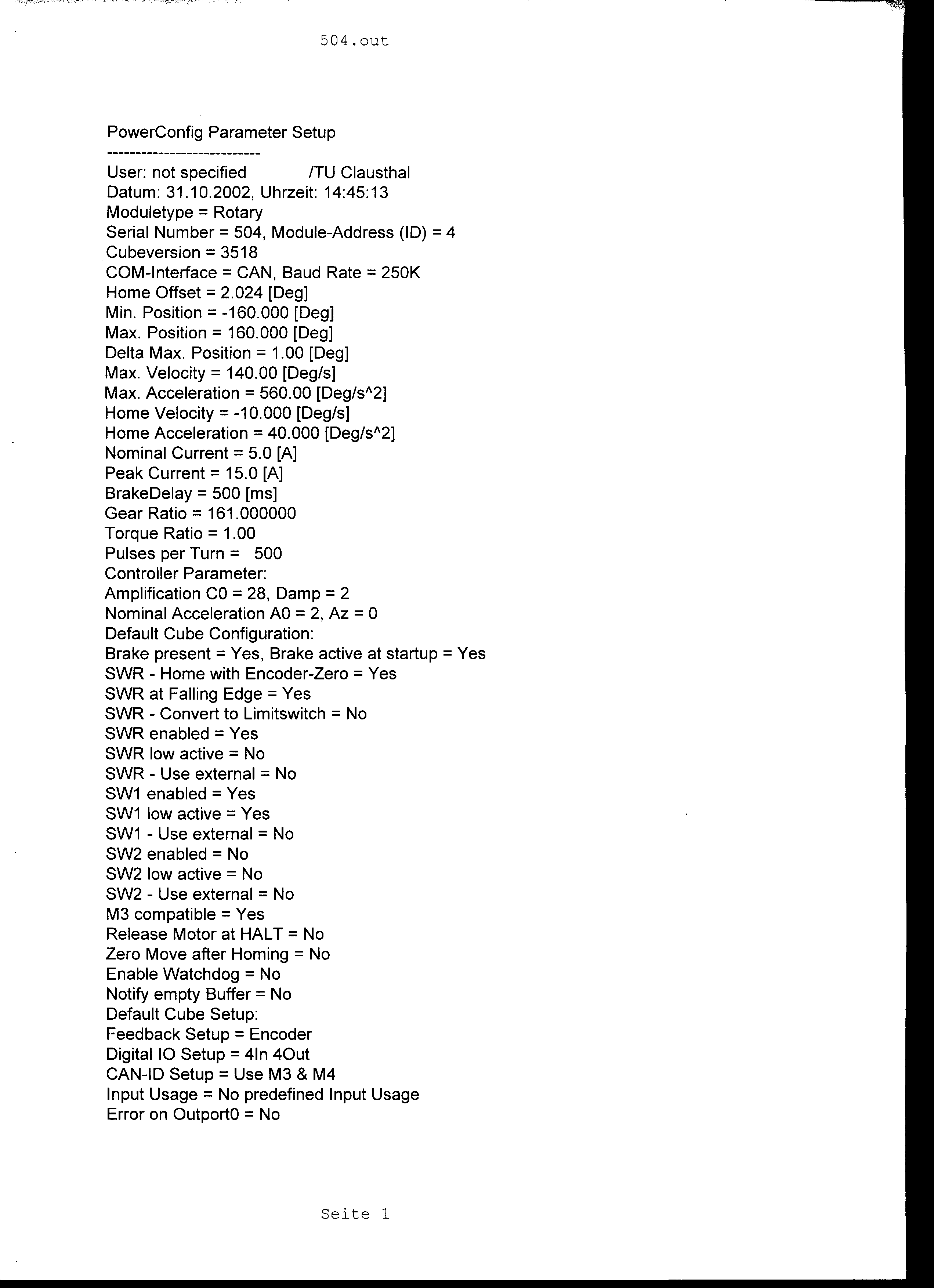
Daten der Rotationsmodule:
 |
|
Daten des Fingers: Seriennummer: 5c2, Modul-ID: 9, Aktionsbereich von -0.5mm bis 58mm
Weitere technische Dokumentationen:
- Handbuch für die Power-Cube-Module: [Handbuch.pdf]
- Handbuch der Vorgängerversion: [MORSE3D.pdf]
- Konfigurationsdatenblätter: [kscan_0004.png] [kscan_0003.png] [kscan_0008.png] [kscan_0001.png] [kscan_0007.png] [kscan_0002.png] [kscan_0006.png] [kscan_0005.png]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Autor: gkemnitz, Letzte Änderung: 14.04.2011 15:10:00
TU Clausthal 2020 Impressum