
Problem 1: Wie lässt sich der c't-Bot steuern?
Serielle Schnittstelle:Der c't-Bot erhält seine Befehle über die Tastatur eines PC's. Das bedeutet, dass man für die Ansteuerung des Roboters eine serielle Schnittstelle benötigt. Einer ihrer Steckverbinder wird auf die Stiftleidte J4, welche sich auf der Hauptplatine befindet, gesteckt. Der Massepin der Stiftleiste befindet sich dabei ganz oben am äußeren Rand der Platine.
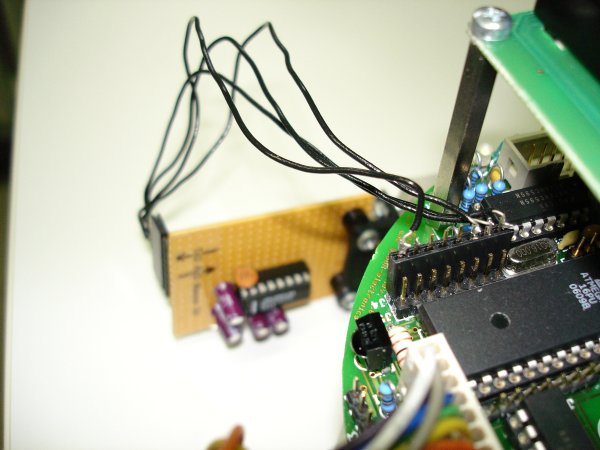
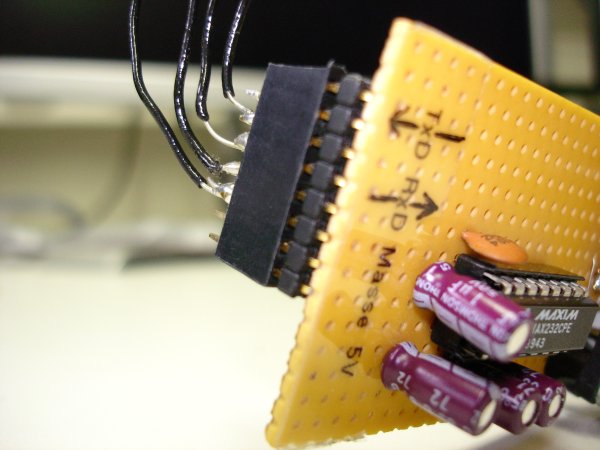
Der andere Verbindungsstecker muss jetzt wie unten gezeigt auf die Stiftleiste der seriellen Schnittstelle gesteckt werden. Dabei sollte darauf geachtet werden, dass das Massekabel als zweites von links auf die Stiftleiste gesteckt wird.
Achtung!
Um den c't-Bot allerdings im Raum auf dem Fußboden testen zu können, muss die serielle Schnittstelle immer wieder vom Roboter abgezogen werden, was wiederum ihre gelöteten Verbindungen belastet. Lässt sich der c't-Bot also nicht mehr über die Tastatur steuern, sollte man zuallererst die Lötverbindungen der seriellen Schnittstelle überprüfen und eventuell neu nachlöten.
GtkTerm:
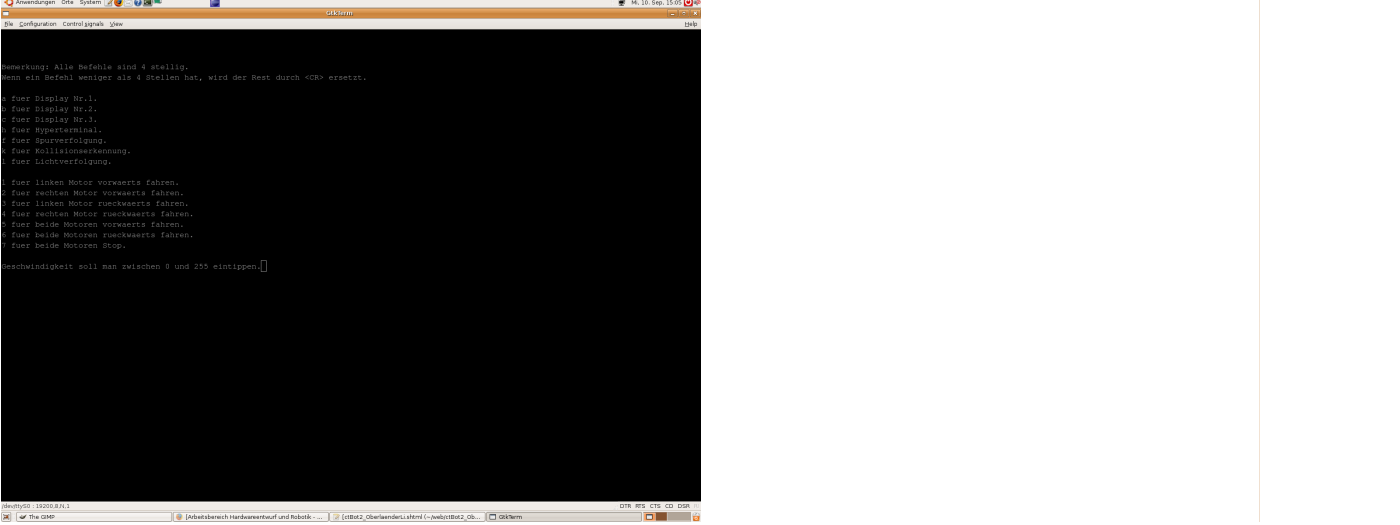
Um über die Tastatur Steuerungsbefehle eingeben zu können, benötigt man zusätzlich den GtkTerm. Dieser lässt sich in der Panel-Leiste unter Anwendungen und Zubehör als Serial port terminal bezeichnet auffinden. Hat man diesen dann auf seinem Bildschirm geöffnet, muss man noch unter Configuration Port anklicken und dort unter Speed "19200" einstellen. Diese Baudrate bezieht sich allerdings nur auf den c't-Bot(2). Für den ersten c't-Bot muss man bei Speed nämlich noch "9600" eingeben. Die anderen Einstellungen bleiben erhalten.
Wenn man jetzt entweder Akku- oder Netzbetrieb einschaltet und den Reset-Button drückt, sollte im GtkTerm folgende Auflistung erscheinen:
Autor: ifko, Letzte Änderung: 19.09.2008 19:44:13