
Fahrwerk
| Aufbau, Bedienung, Sicherheitshinweise und Dokumentationen zum Fahrwerks |
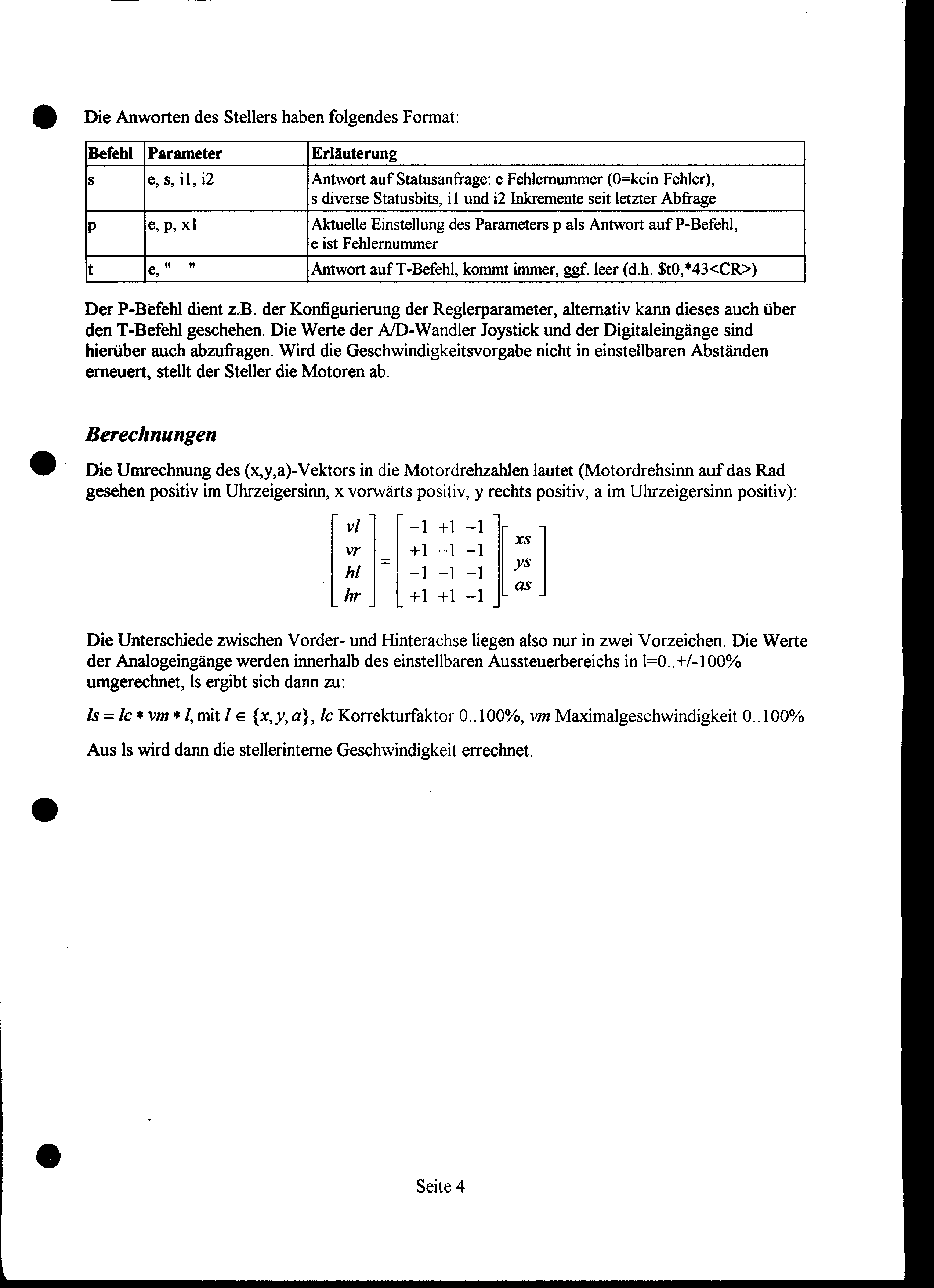
Übersicht
- Sicherheitshinweisemodule
- Handsteuerung
- Hauptsteuerungende
- Bedienung
- Hauptsteuerungende
- Hauptsteuerungende
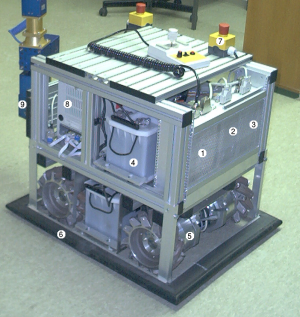
Aufbau
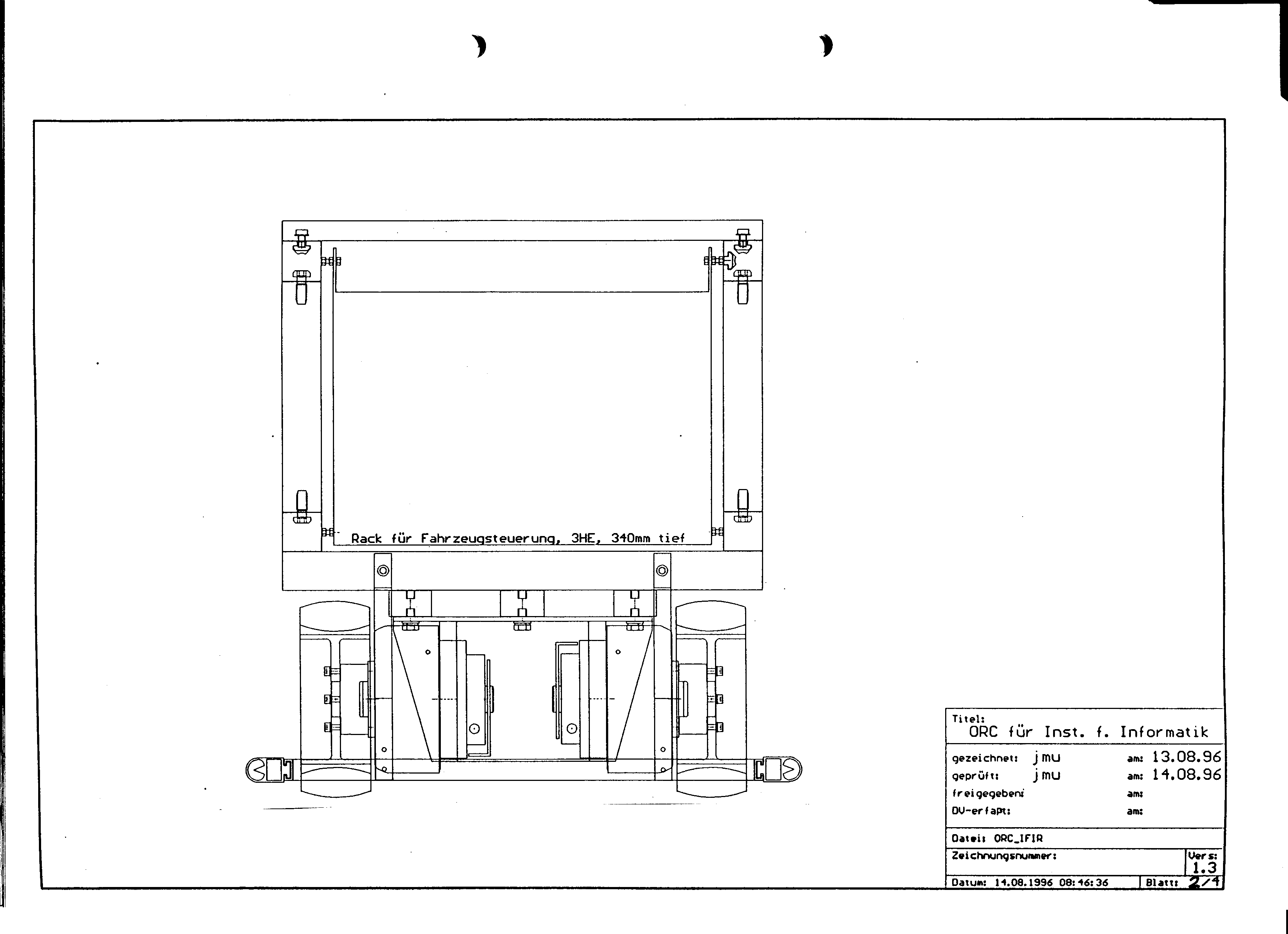
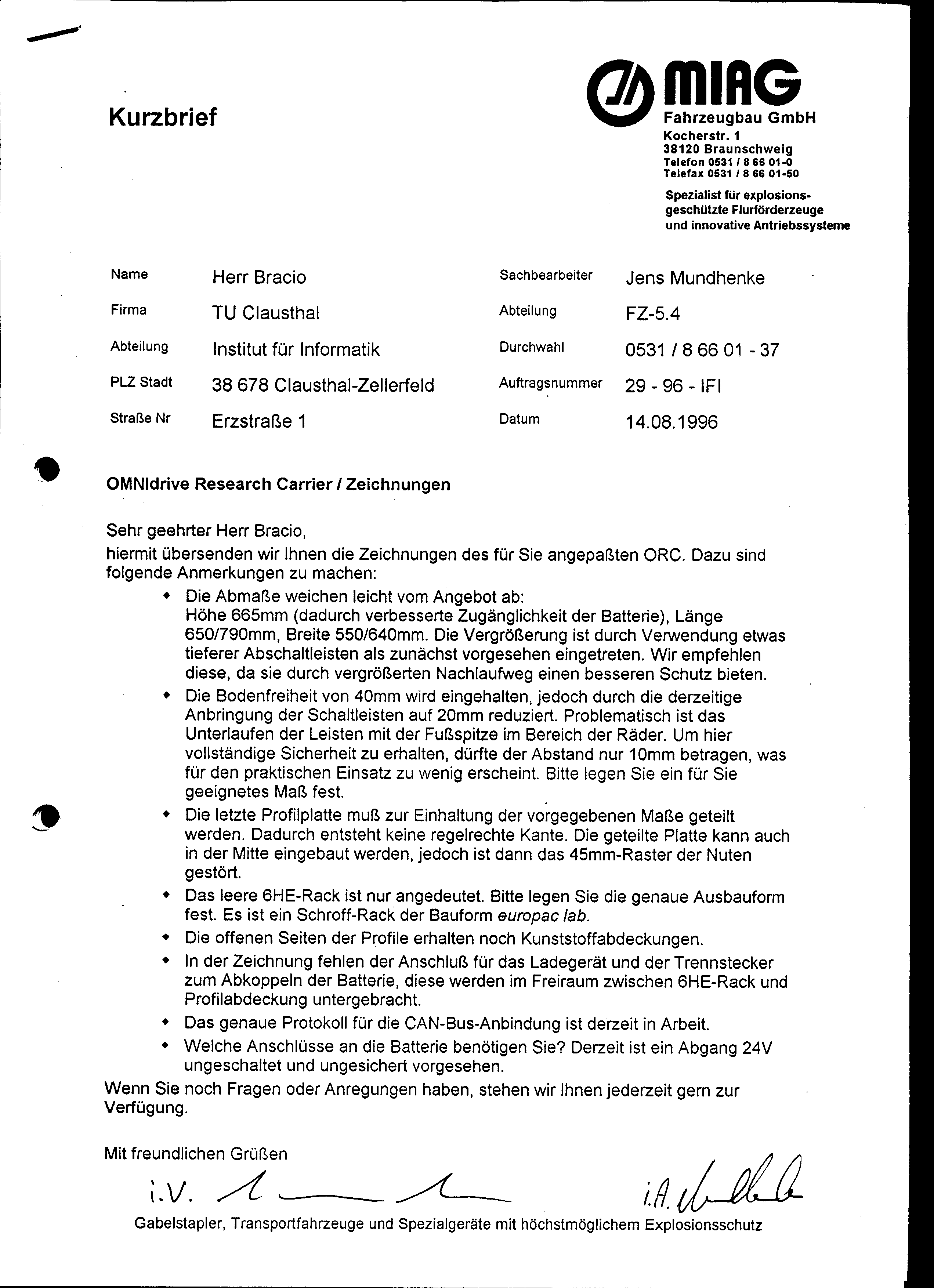
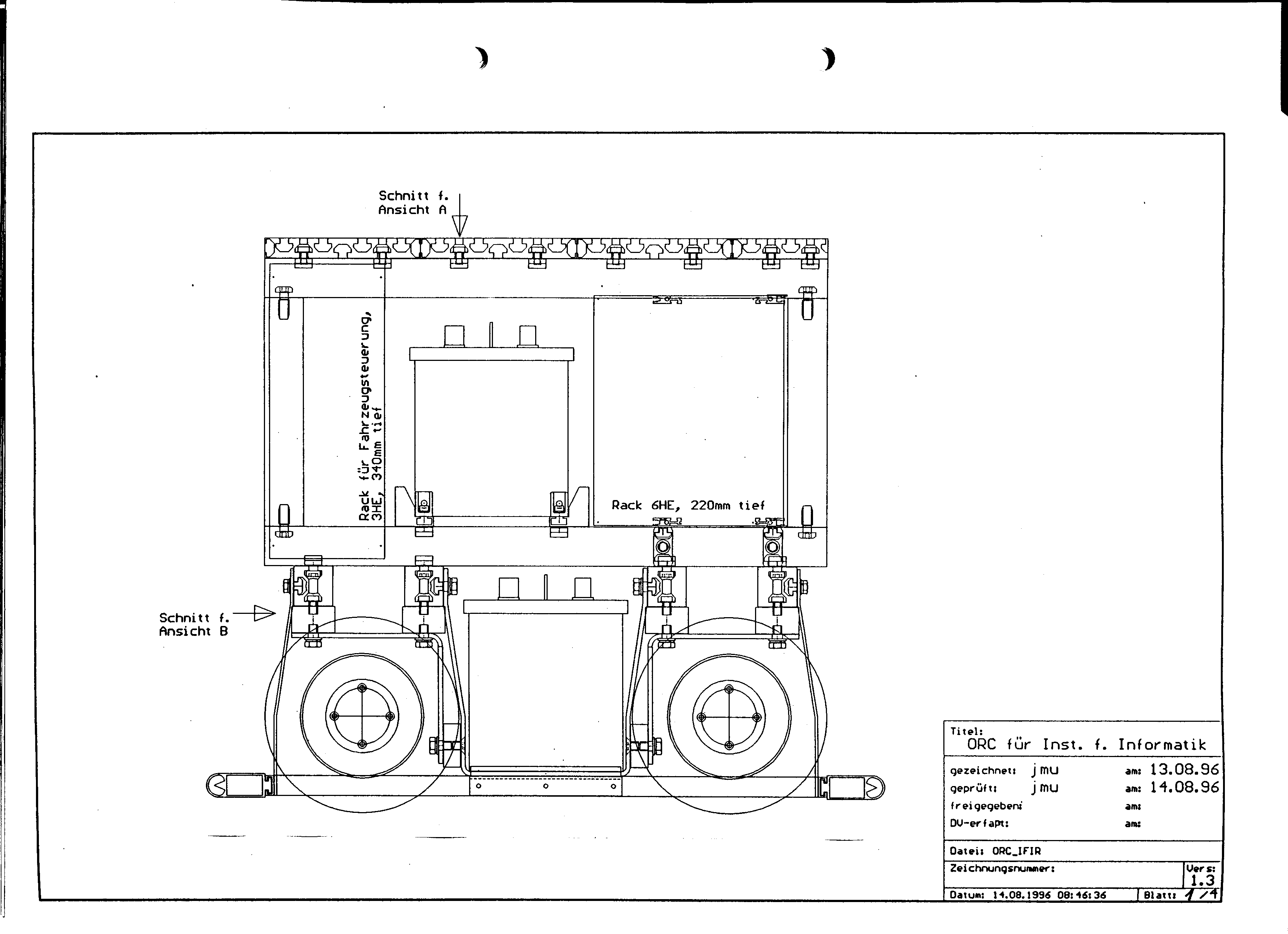
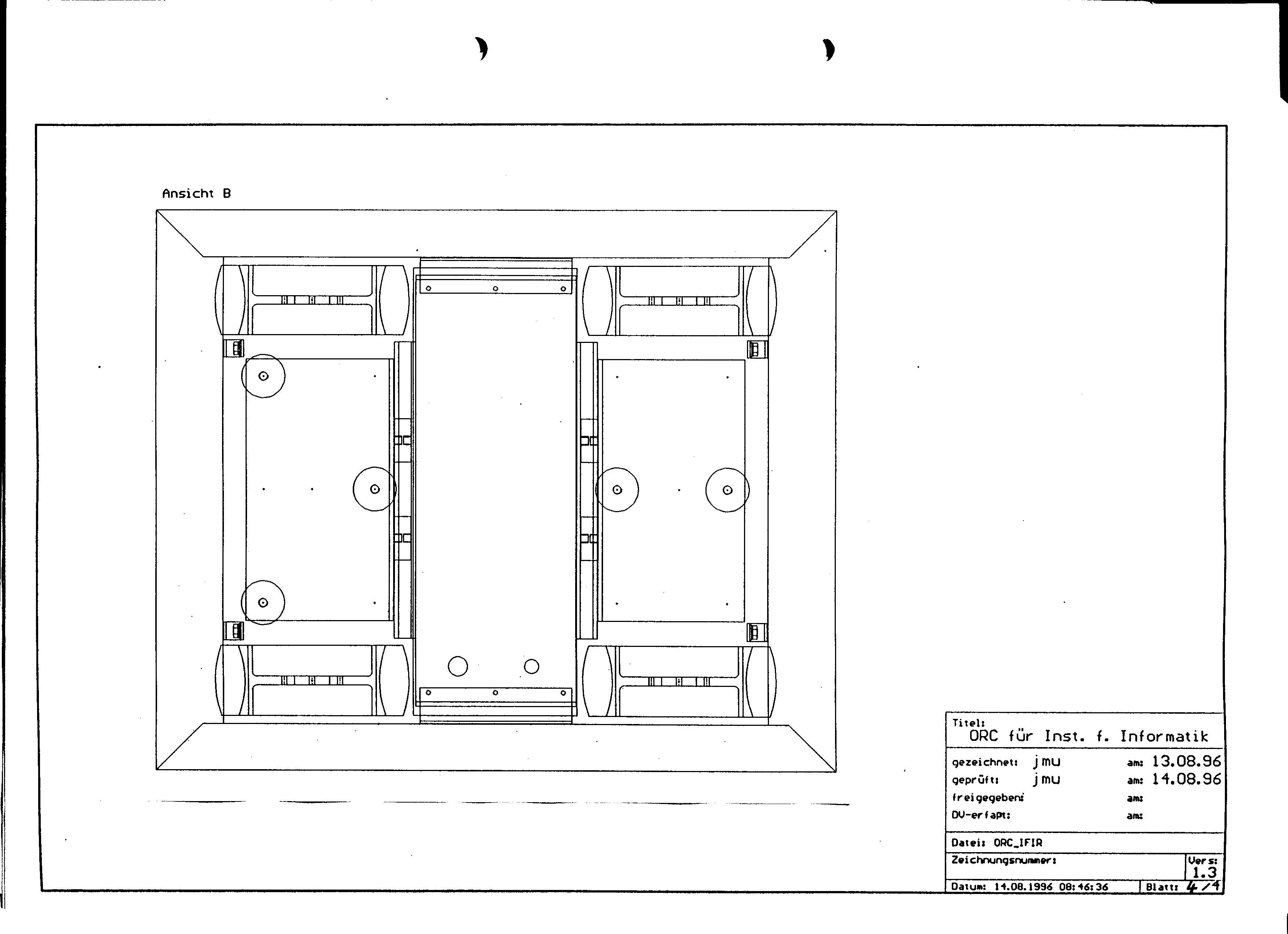
Das Fahrwerk besteht aus einem Rahmen aus Alu-Profilen, in dem zwei 12V 110-130Ah-Blei-Akkus, die Hauptsteuerung und die Steller montiert sind. Die Mecanum-Räder erlauben es, dass sich der Roboter auch auf der Stelle drehen und seitwärts fahren kann.
 |
|
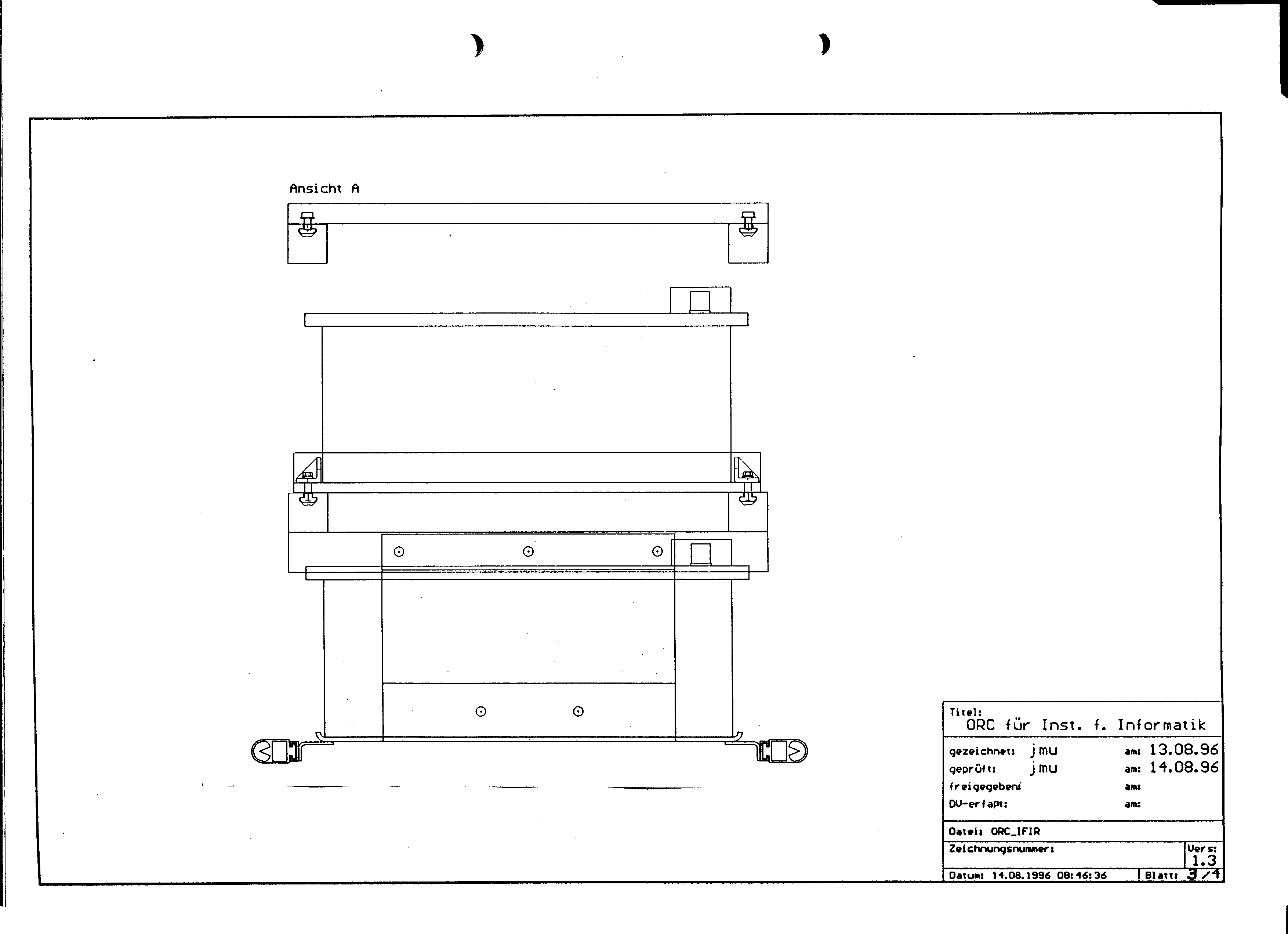
- Konstruktionszeichungen: [kscan_0004.png] [kscan_0003.png] [kscan_0008.png] [kscan_0009.png] [kscan_000a.png] [kscan_0001.png] [kscan_0007.png] [kscan_0002.png] [kscan_0006.png] [kscan_0005.png]
- Änderungen: [kscan_0004.png] [kscan_0003.png] [kscan_0001.png] [kscan_0002.png] [kscan_0005.png]
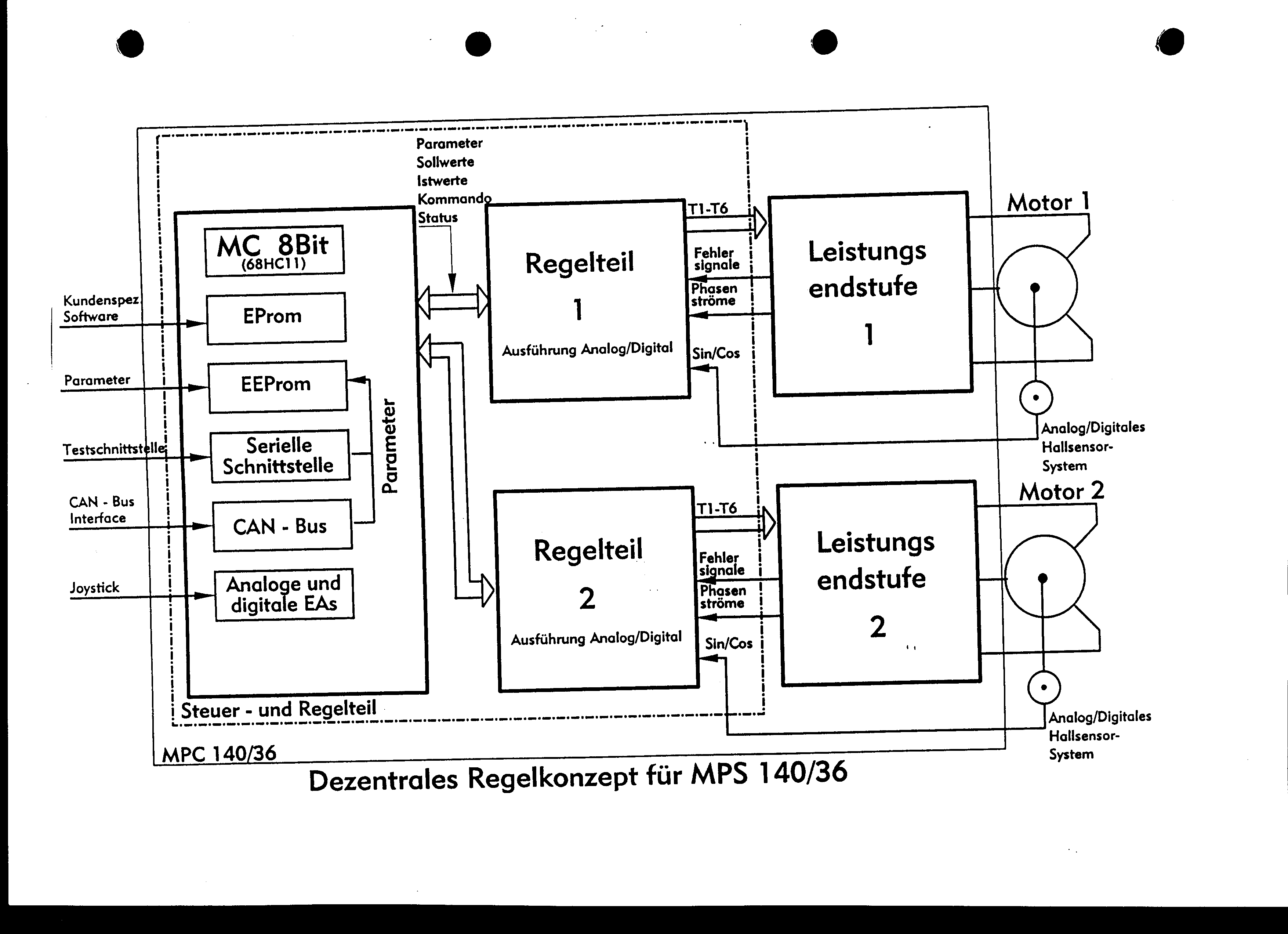
- Regungskonzept: [kscan_0014.png]
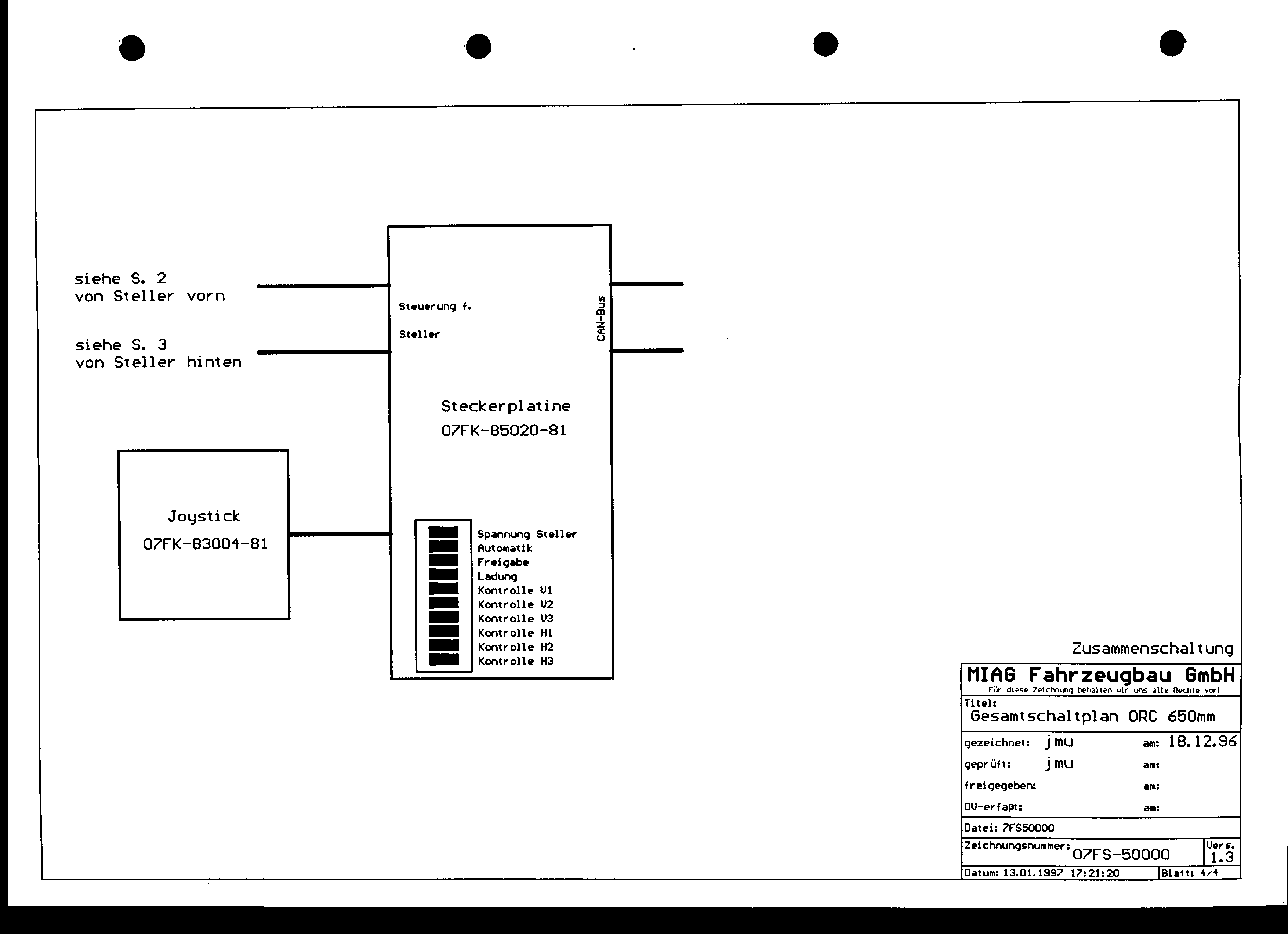
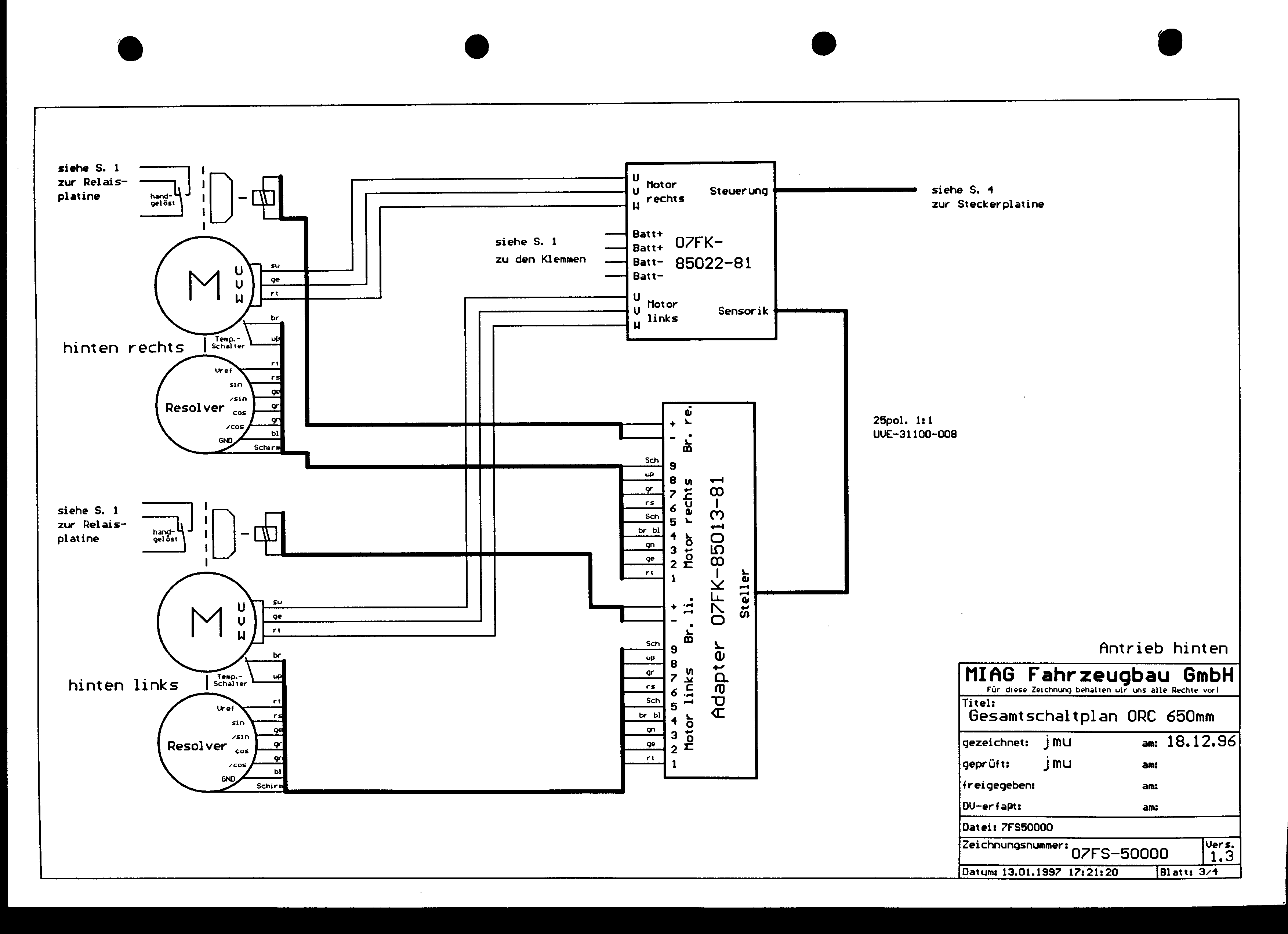
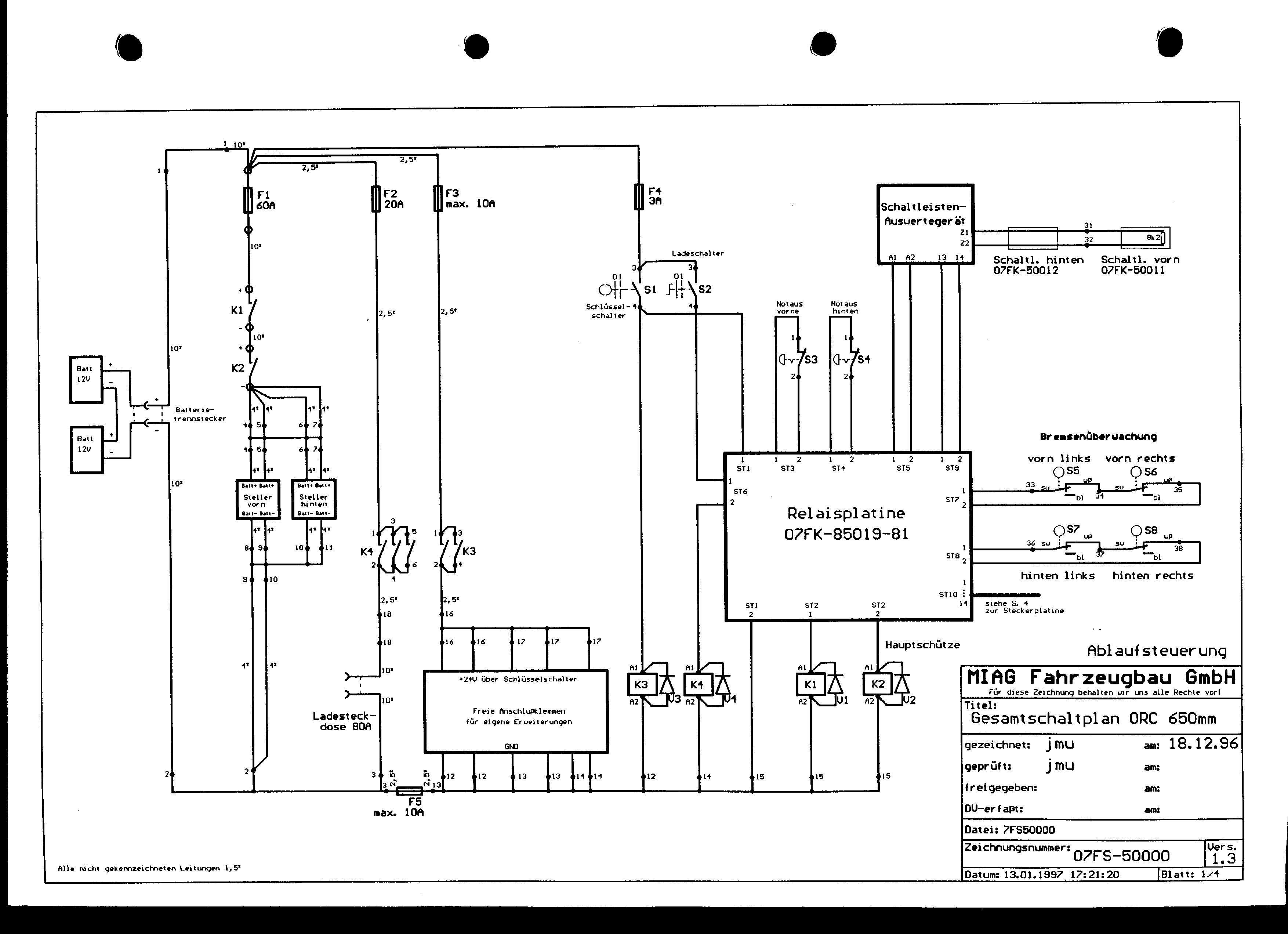
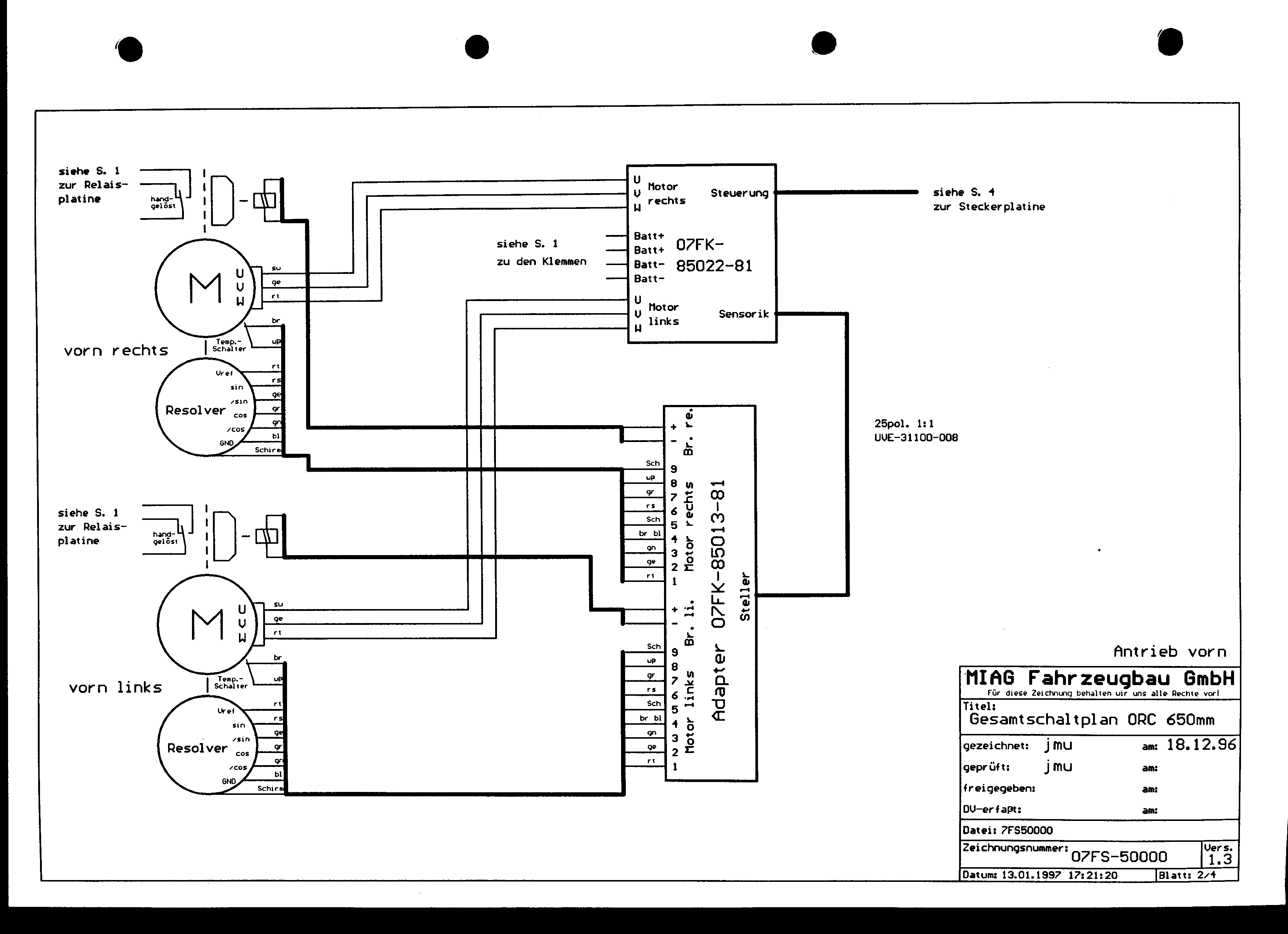
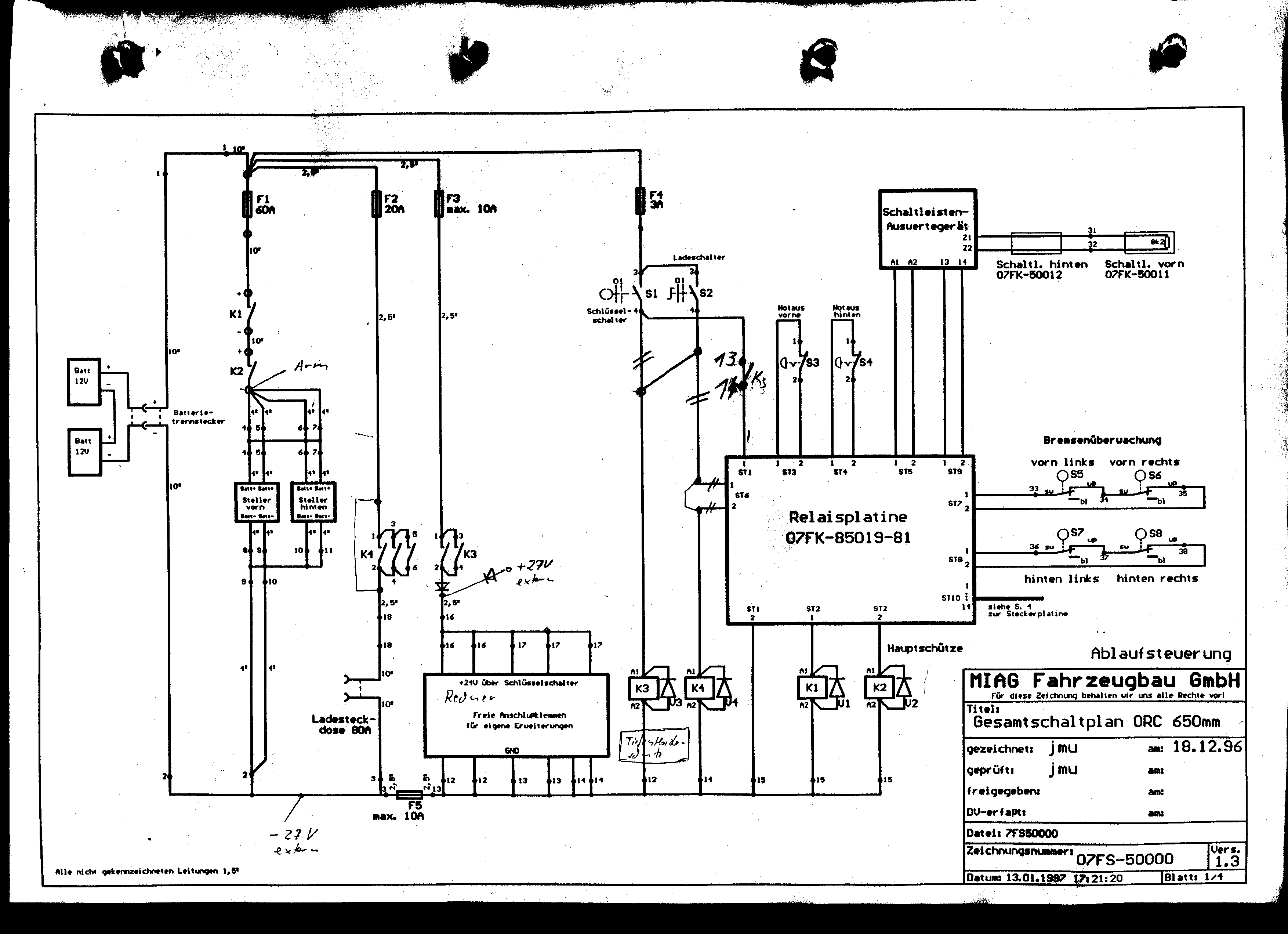
- Schaltpläne: [kscan_0004.png] [kscan_0003.png] [kscan_0001.png] [kscan_0002.png] [kscan_0005.png]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Sicherheitshinweise
Der Roboter hat zwei Notschalter und einen Bumper an der Unterseite, über die er in Gefahrensituationen abgeschaltet wird. Bei allen Experimenten, bei denen sich der Roboter bewegt oder bewegen könnte, muss stets eine zweite Person neben dem Notschalter stehen, um ihn bei unkontrollierten Bewegungen auszuschalten.
Das Fahrwerk und der Arm sollten möglichst nicht mit Hinternissen kollidieren. Wenn die Exerimente eine Kollision erfordern, ist eine niedrige Geschwindigkeit zu wählen.
Handsteuerung
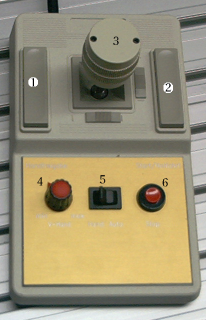
Abb.: Handsteuerung des Industrieroboters
Die Bedienelemente in der Abbildung haben folgende Funktion:
- Totmanntaster: Muss während der Fahrbewegungen gedrückt gehalten werden.
- Einschalter (Bumperüberbrückung): Schaltet das Hauptschütz der Stromversorgung ein. Achtung: während dieser Taster gedrückt ist, sind die Notaus-Funktionen überbrückt.
- Joystick: Bewegungssteuerung der Fahrwerks in den Freiheitsgraden: rechts/links, vor/zurück und drehen
- Einstellung der Höchstgeschwindigkeit
- Umschalter Handsteuerung-Automatikbetrieb
- Notaus-Taster
Hauptsteuerung
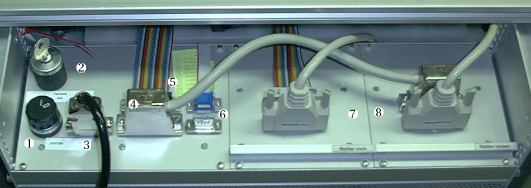
Abb.: Bedienfeld der Hauptsteuerung
Die Bedienelemente in der Abbildung haben folgende Funktion:
- Schalter für die Stromversorgung: Abschalten der gesamten Elektronik incl. Rechner
- Schlüsselschalter: Abschalten des Arms und der Steller
- Anschluss der Handsteuerung
- Anschluß der Steller: Das Flachkabel ist der Ersatz für ein defektes Rundkabel und führt zum vorderen Steller.
- Status-LEDS (vom Flachkabel verdeckt). Bedeutung von oben nach unten:
- Überstrom/Temperatur hinten
- Unterspannung hinten
- Bremse manuell hinten
- Überstrom/Temperatur vorne
- Unterspannung vorne
- Bremse manuell vorne
- Laden
- Automatik
- Freigabe
- Spannung Steller
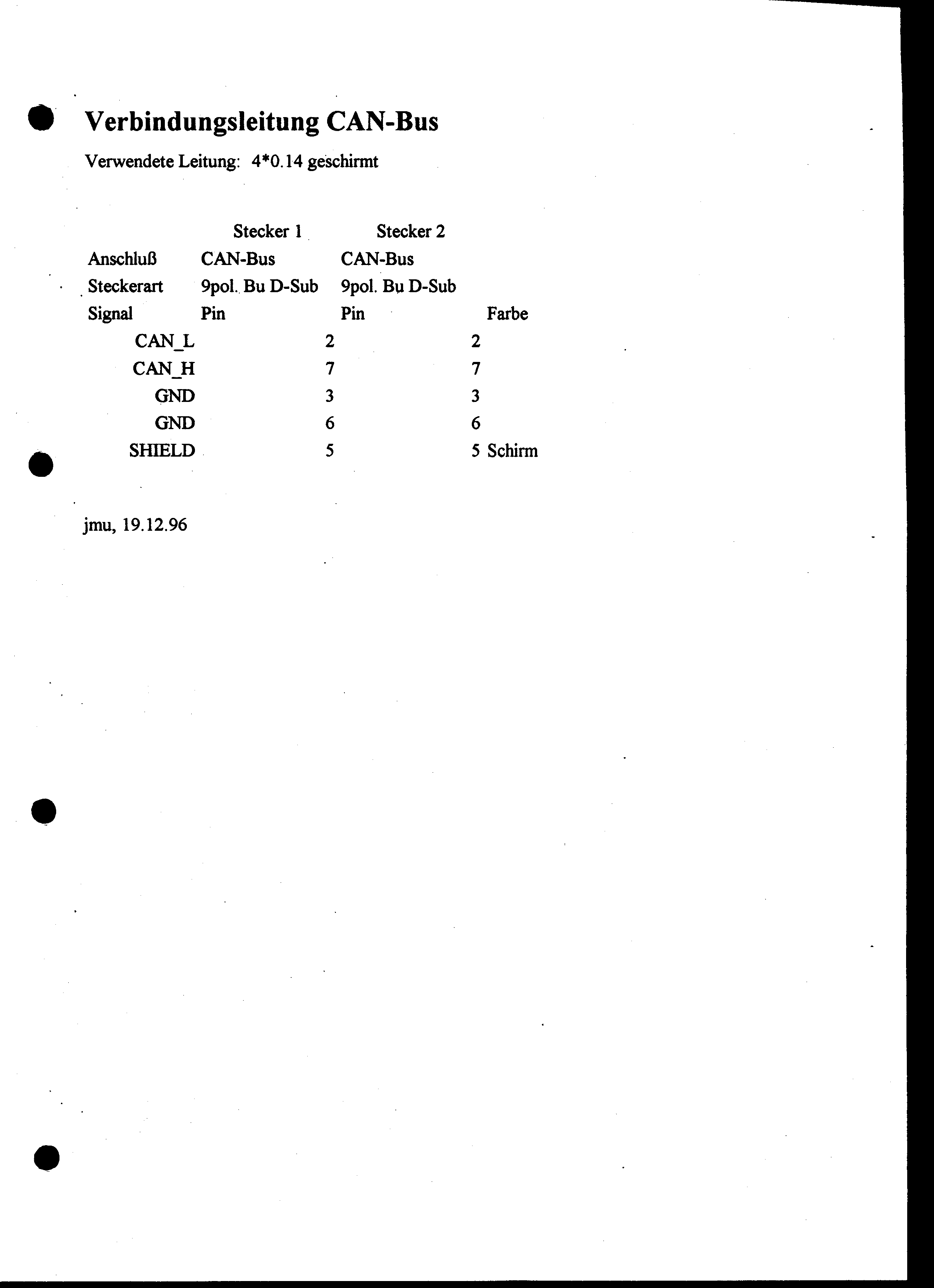
- CAN-Anschlüsse für die Automatiksteuerung: Hiermit ist der Rechner an das Fahrwerk angeschlossen. Im Bild zu sehen ist das Kabel des Rechners (hinten) und ein Terminator (vorne).
- Steller vorne
- Steller hinten
- Hauptversorgung aktivieren (Bedienfeld-1 einschalten)
- Fahrwerksversorgung freigeben (Bedienfeld-2 einschalten)
- Geschwindigkeitsbegrenzung (Handsteuerung-4) prüfen (Mittelstellung ist meistens in Ordnung)
- Auf Handsteuerung schalten (Handsteuerung-5 nach links)
- Fahrwerk aktivieren (Handsteuerung-2 kurz betätigen)
- Totmann (Handsteuerung-1) halten und gehalten lassen
- Mit dem Joystick (Handsteuerung-3) das Fahrwerk bewegen
- Der Rechneranschluß erfolgte über die Hauptversorgung, womit das Fahrwerk immer versorgt wurde, wenn der Rechner lief.
- Es bestand keine Möglichkeit, den Rechneranschluß extern zu speisen.
- Eine Notabschaltung bei Unterspannung der Akkus war nicht vorgesehen.
- Der Arm hatte keine ausreichende Stromversorgung.
- Da der Ladeschalter nicht unbedingt nötig war, wurde sein Schütz überbrückt und der Ladestecker ist fest mit der Batterie verbunden.
- Der Arm wurde an hinter Schütz K2 parallel zu den Stellern geschaltet, damit erhält er ausreichend Strom.
- Die Rechnerversorgung wurde hinter Schütz K3 mit einer Schottky-Diode versehen und eine zweite Schottky-Diode führt zur externen Versorgungsbuchse.
- Ein LCD-Voltmeter wurde zur Batteriespannungsüberwachung angeschlossen. Die Versorgung erfolgt über die Rechnerversorgung.
- Der Ladeschalter schaltet Schütz K3 und damit die Rechnerversorgung aus der Batterie.
- Eine Akkuschutzschaltung wurde eingebaut und diese schaltet Schütz K3 aus, wenn die Batteriespannung unter einen kritischen Wert absinkt.
Bedienung

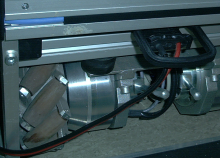
Abb.: Das Ladegrät (l) und der Anschluss des Ladekabels an den Roboter
Vor der Benutzung wird in der Regel das Ladekabel angezogen. Nach der Benutzung ist der Roboter immer an das Ladegerät anzuschließen und der Ladevorgang zu starten. Das Ladegerät muss den Lademodus wie im Bild links mit seiner gelben LED signalisieren
Inbetriebnahmeschritte:
Nach Kollision mit einem Hindernis oder Betätigung eines Notausschalters ist Taster 2 der Hansteuerung erneut zu betätigen. Die Steller sind mir einem Überlastschutz ausgestattet. Wenn sich ein Räderpaar (hinten oder vorne) plötzlich nicht mehr bewegt, mit Schlüsselschalter aus- und wieder einschalten.
Umbauten an der Elektronik
Die Originalbeschaltung der Elektrik hatte einige gravierende Probleme:
{kind=link}
Autor: gkemnitz, Letzte Änderung: 14.04.2011 15:10:00